










This website uses cookies to help improve your user experience


Today, the market of public surveillance solutions has a huge niche for a computer vision technologies and their implementations. Using these technologies allows us to make a significant step in process automation and data processing, gain meaningful insights from raw data, and improve decision-making. Even though there are some competitors that offer out-of-the box solutions, Oxagile explored one of the most challenging fields of public surveillance domain — tracking live video objects with a moving camera. The task is challenging due to the following factors:
A major task of a typical video object tracking is aimed at keeping track of a chosen object until the very end of video or up to the moment the object disappears. The process starts with a bounding box around an object that is given as a set of coordinates. For every next frame of the video, the tracker must locate the object as well as update its internal state so it can continue tracking in the frames that follow.
An important goal is to train algorithm to update target’s condition to be able to detect its state updates later. To evaluate tracking system performance, we checked IoU (Intersection over Union) metrics that were calculated based on the frame resulted from tracking performance and manually created bounding box around object.
Below, we would like to share some of the technical insights our R&D team gained while building solutions for the video surveillance domain.
There are two general high-level tracking approaches.
The first one is to choose an area of interest on the very first frame and then just track it in all the following frames. All the algorithms that we’ll further describe in details belong to this category.
The second one is to use the algorithms that allow connecting the results of objects detection in one line (for example, approaches like Tracking via Generalized Maximum Multi Clique Problem or Graphical Social Topology Model for Multi-Object Tracking).
The majority of tracking approaches are based on the same set of algorithms that were improved and modified for a particular purpose. The basic algorithms are KCF (kernelized correlation filter), TLD (Tracks, Learns and Detects), Minimum Output Sum of Squared Error (MOSSE) filter, Struck (Structured Output Tracking with Kernels), Median Flow Tracker (this algorithm fails to track objects that move fast or quickly change their appearance), and others.
Most demo videos on the Internet are made using static cameras. Moreover, targeted objects on such recordings are usually located quite far away from camera, which makes their motions, even the most complex ones, simplified, linear and more predictable.
If a person or tool on video recording moves, the distance between the camera and the targeted object does not change — they both move at the same speed. Furthermore, in most of the cases the object is tracked in “empty” environment, without any noise, background clutter or occlusions of the same nature, which creates a new field for research — tracking occluded objects.
On top of this problem, we explore a completely different and complex case that is not covered by any existing algorithm nowadays — processing videos from body cameras. There are several reasons why the complexity of this case makes existing tracking algorithms fail:
The dlib tracker is built on the basis of a correlation filter. The correlation algorithm models object’s appearance after being trained on a sample image patch. In our case, it is given by a user as a bounding box and described by a set of coordinates.
With dlib, it is possible to track objects and update correlation filters or object’s appearance simultaneously. In order to get a new location of the target on the second and the following frames, we calculate correlation between the filter and a search window at every next frame, and then find the highest value in the correlation output. Going a bit deeper into a black box of the algorithm, the work of the dlib tracker can be described as follows.
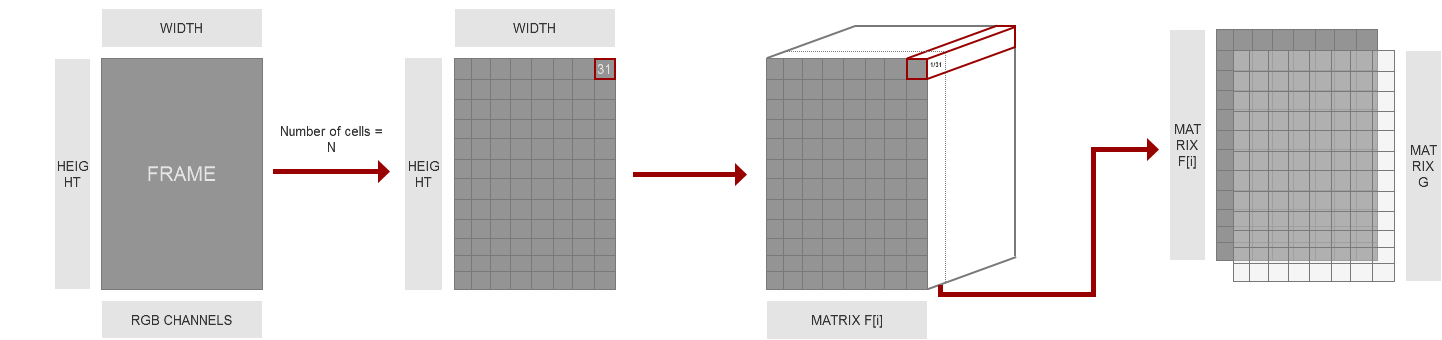
On the very first frame, we extract object features from the area, defined by a manually created bounding box. Initially all images consists of width, height, which is commonly known as resolution, and 3 color channels, which define the color scheme of the picture. Feature descriptor converts an image to a feature vectors of some length. To do that, dlib uses 31 dimensional version of HOG (histogram of oriented gradients) feature extraction method [2]. It takes an image, divides it into cells (the cell size is some predefined number), and for each cell computes 31 dimensional version of HOG features. It means that for each cell of the image we have some vector of length, equal to 31, describing this cell. At the very end, we represent an image as a set of vectors, where shape equals length of the feature vector (equal to 31), multiplied by the amount of cells fit by width and the amount of cells fit by height.
The process of computing this feature vector differs from the standard version of HOG feature extraction, where we are looking at magnitude and direction of the gradient of cell, and there for each image cell we compute the histogram, which contains 9 bins corresponding to angles 0, 20, 40 … 160, then concatenate histograms of four neighboring cells, forming a block, into a vector of length 36, normalize vector and repeat the process. We will not describe the performance of standard HOG further in details in this paper.
After we extract features of an image, we apply Fourier transform on them. Later it will be necessary to apply convolution theorem. The reason for such manipulations is to simplify the calculation and make algorithm less computationally expensive. Here we receive matrices F[i]. By this notation we will denote in the text below features are after applying Fourier transform.
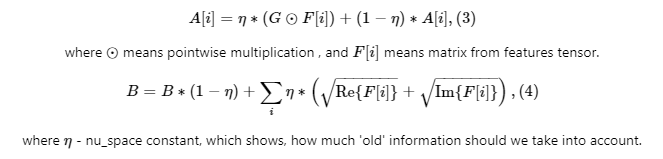
Then we calculate the matrix G in a way to pay more attention on the central area, where the object is located. Calculating the matrix’ elements involves using the distance values between the point described by the element’s indices and the center of the tensor obtained after some patch processing. We build some sort of mapping between image patch and this matrix, where the values we assign depend on the distance between pixel, corresponding this value, and center of the object. After it we also apply Fourier transform on this matrix, and take the complex conjugate of received values. Then we initialize each matrix of filter A (A[i]) by pointwise multiplication of G, obtained above, and matrix of F[i].
Then we initialize filter B with the formula:

Under the operation of taking square root from real or imaginary part of F[i] we mean taking square root of element by element.
Then we make an image pyramid, which will help us to understand scale changes on the further frames. In order to do so, we take additional frames patches with certain scale change step (bigger or smaller) with the same center. Then resize all patches to the size of the original picture. Next we extract HOG features from these patches, and after some transformations we have a vector of matrices responsible for information about target on different scale levels, on which we apply Fourier transform afterwards. On the first frame, we initialize scale filters with a slight difference in matrix G filling: we compute it in such a way so that the scale close to the one on the initial frame has the bigger “weight” than other scales. The further we move from the current scale, the less we trust the response.
To find the object’s location and scale on the following frames, we do the following procedures:
1. Use the filters we got on previous frame and features from current frame to predict the object location by computing the response of the real part of the value:

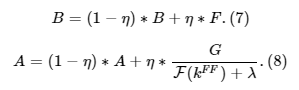
2. Update the position of the object (the location corresponding to the maximum value in the correlation output indicates the new position of the target). And update the position filters by the following formulas:
In a similar way we are dealing with updating current scale and scale filters. Here we use pyramid on a following way: one of these patches from pyramid will have exactly our target in the same scale as we had it on previous frame, and correlation response on this layer will be the highest. The number of this layer will tell us how much scale of the object has changed. As a final step, we perform tracking as well as for the first step and updating the state of the object in the filter. This new state will be compared with the next frame.
| Background clutter case (Background Clutter).Test covers the situation when the person is moving forward in a crowd of other people, being slightly occluded by one of them at a certain moment.
| Appearance changing (3D Rotation). Test covers the situation when target makes 3D rotation (person turns). |
| Artist case (Artist).Test covers the situation when the person is static, but the camera moves dynamically. Moreover, target is small and dark.
| Occlusion by human (Occlusion). Test covers the situation when the person is occluded by another one (occlusion by an object of the same nature).
|
| Appearance changing (Plane Rotation).Test covers the situation when target is moving in vertical and horizontal scales (target sits and stands up from the sofa).
| Occlusion by object (Car). Test covers the situation when the target is rapidly hidden behind the part of road construction (occlusion by an object of a different nature).
|
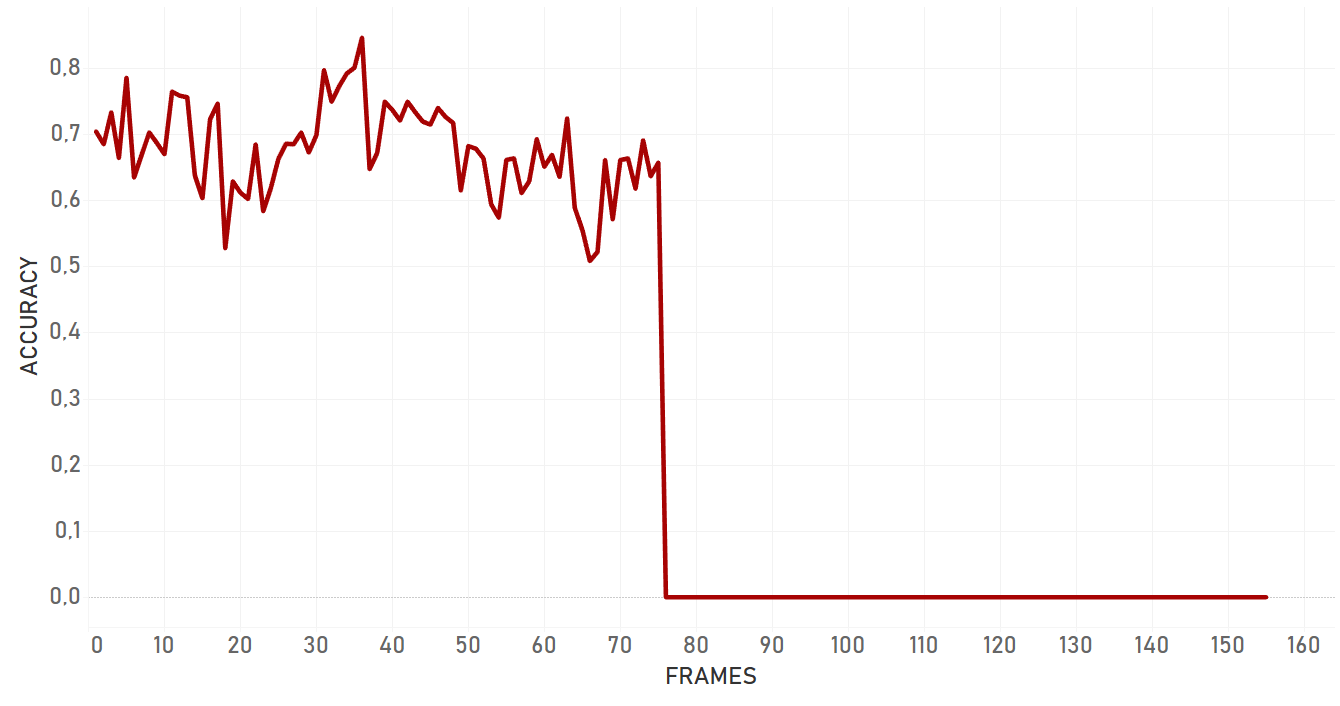
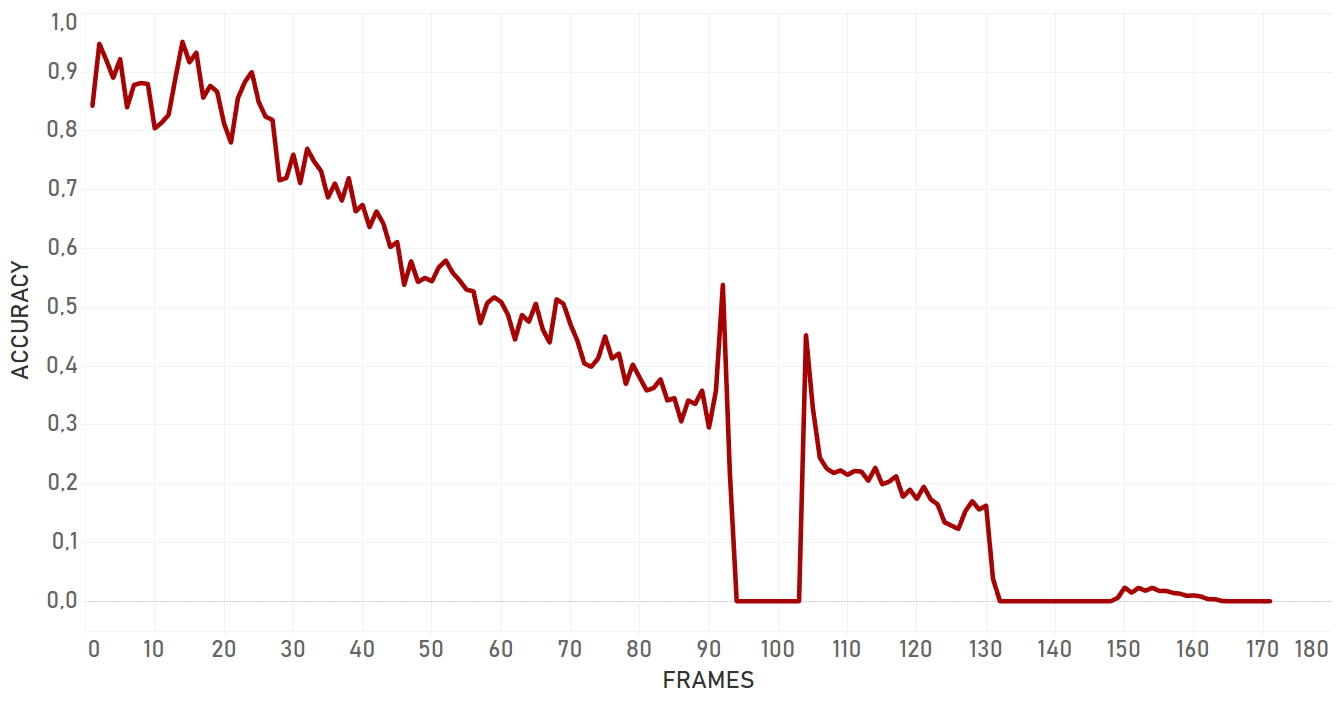
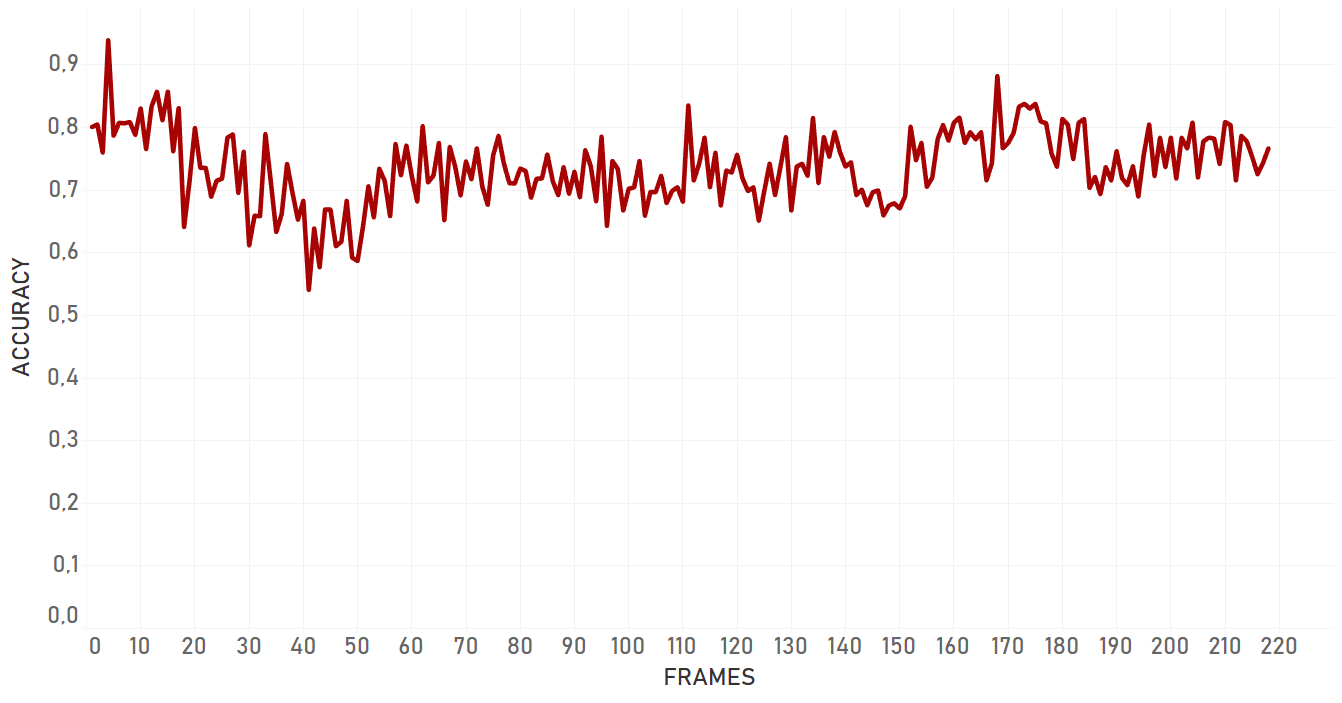
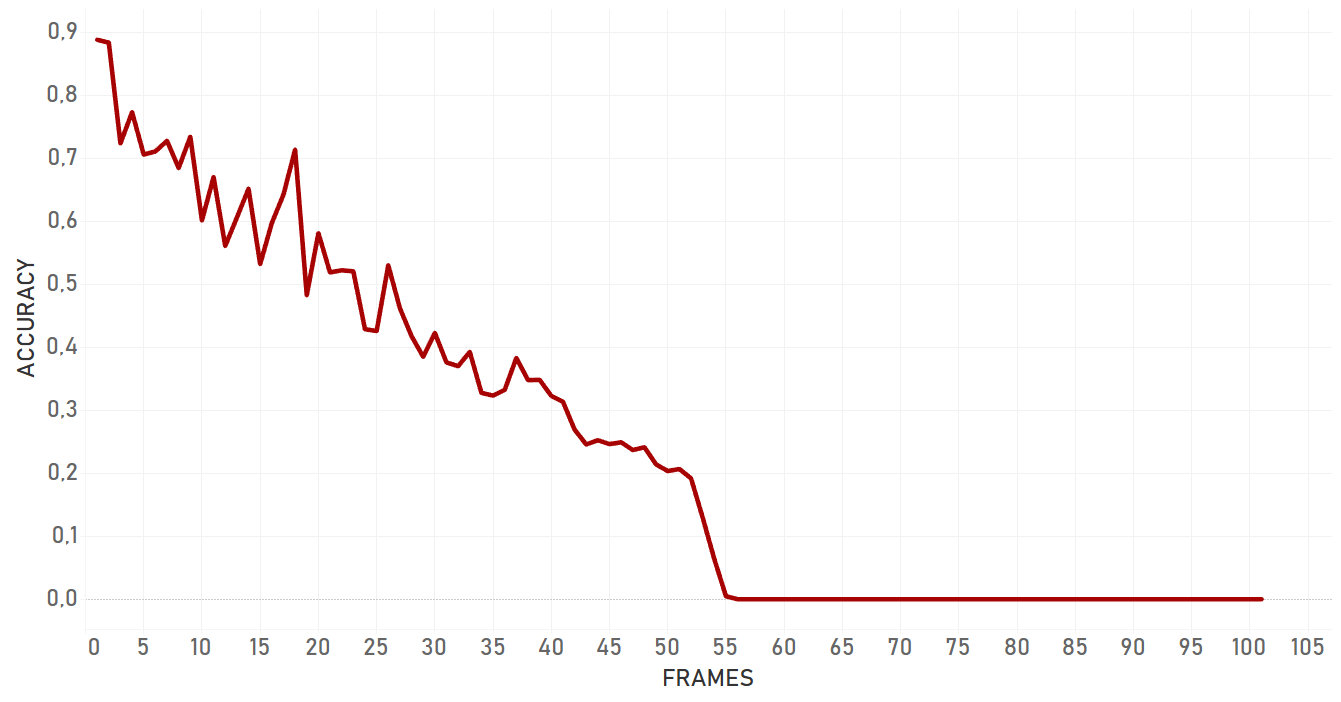
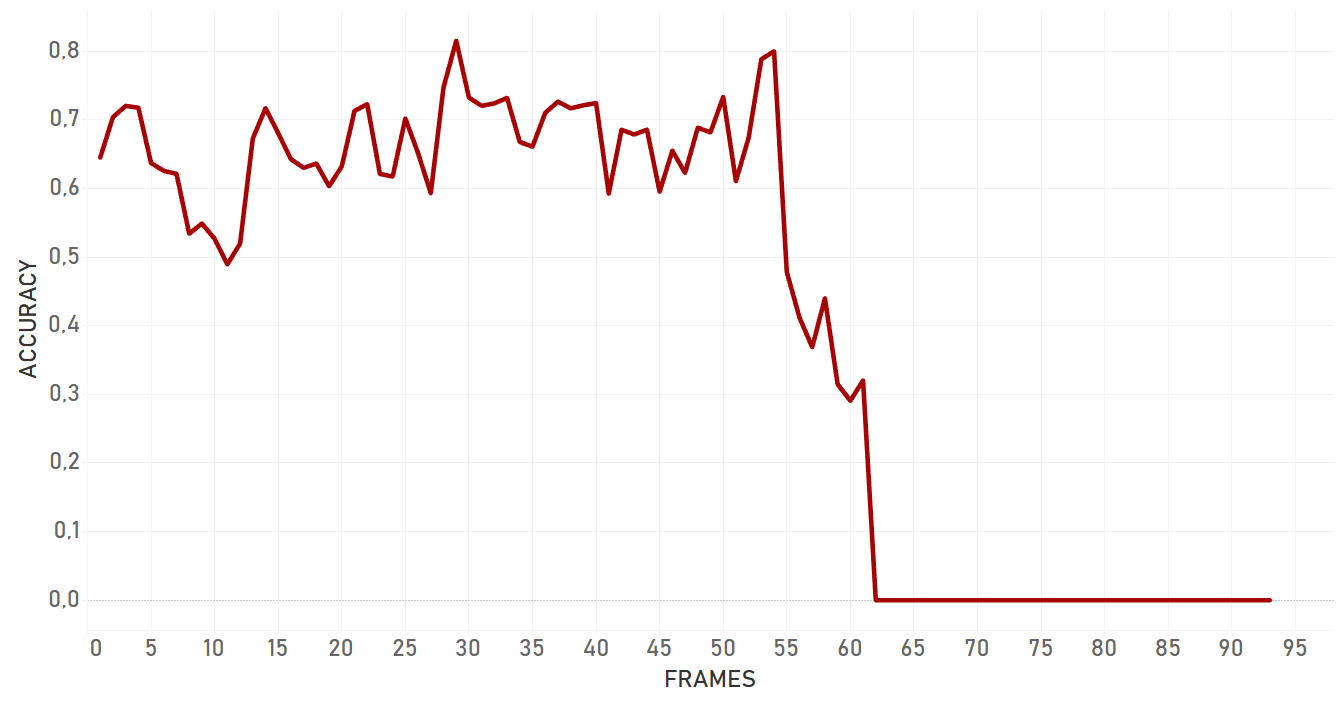
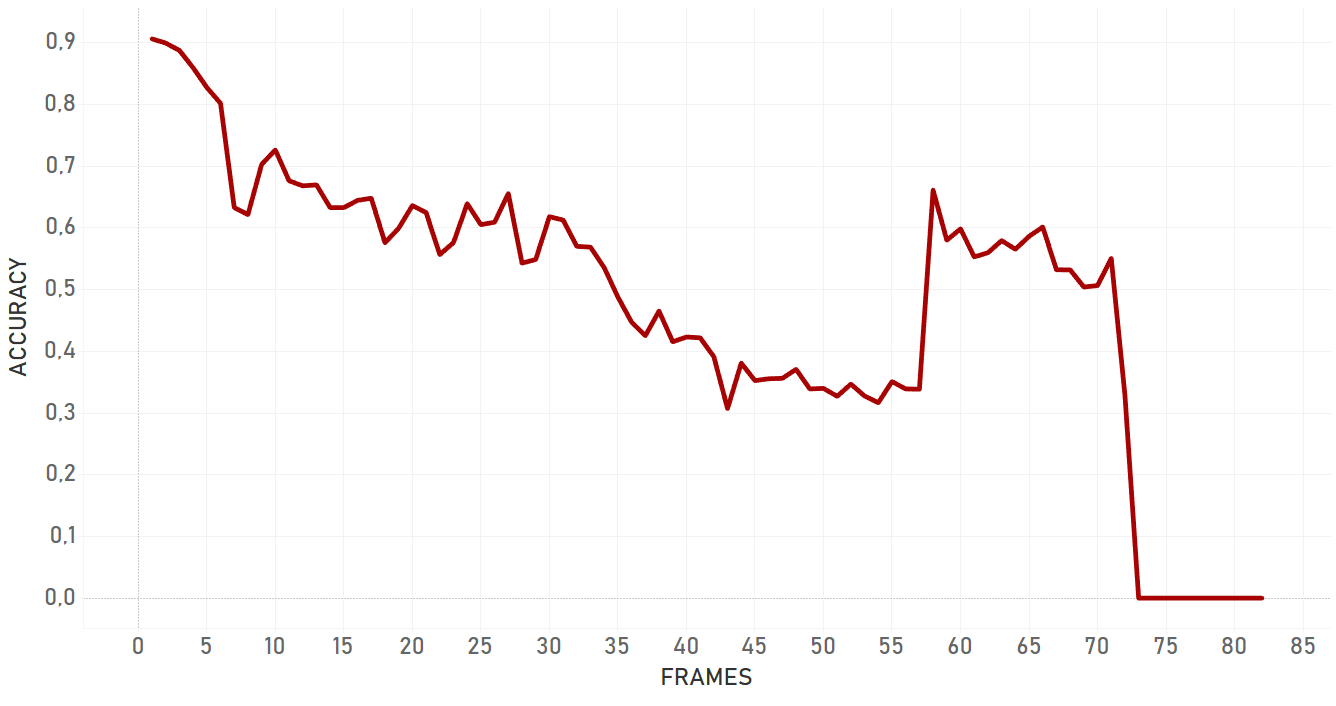
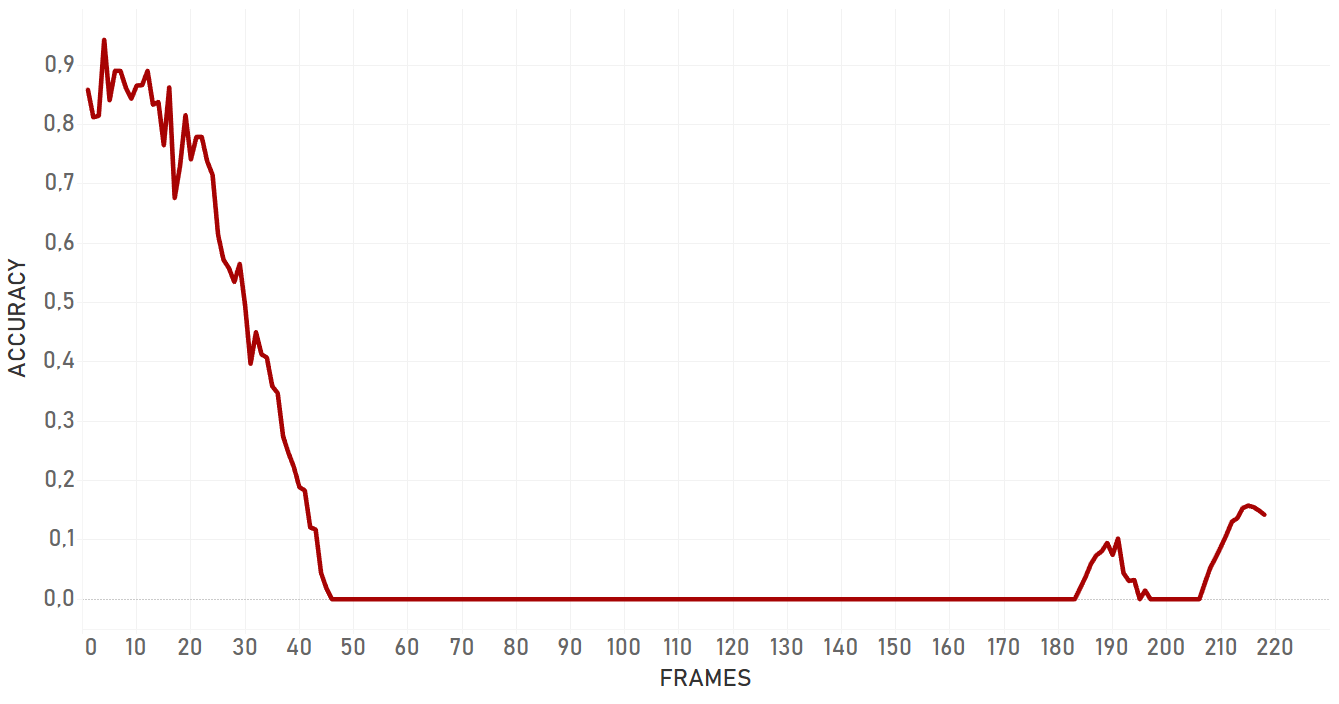
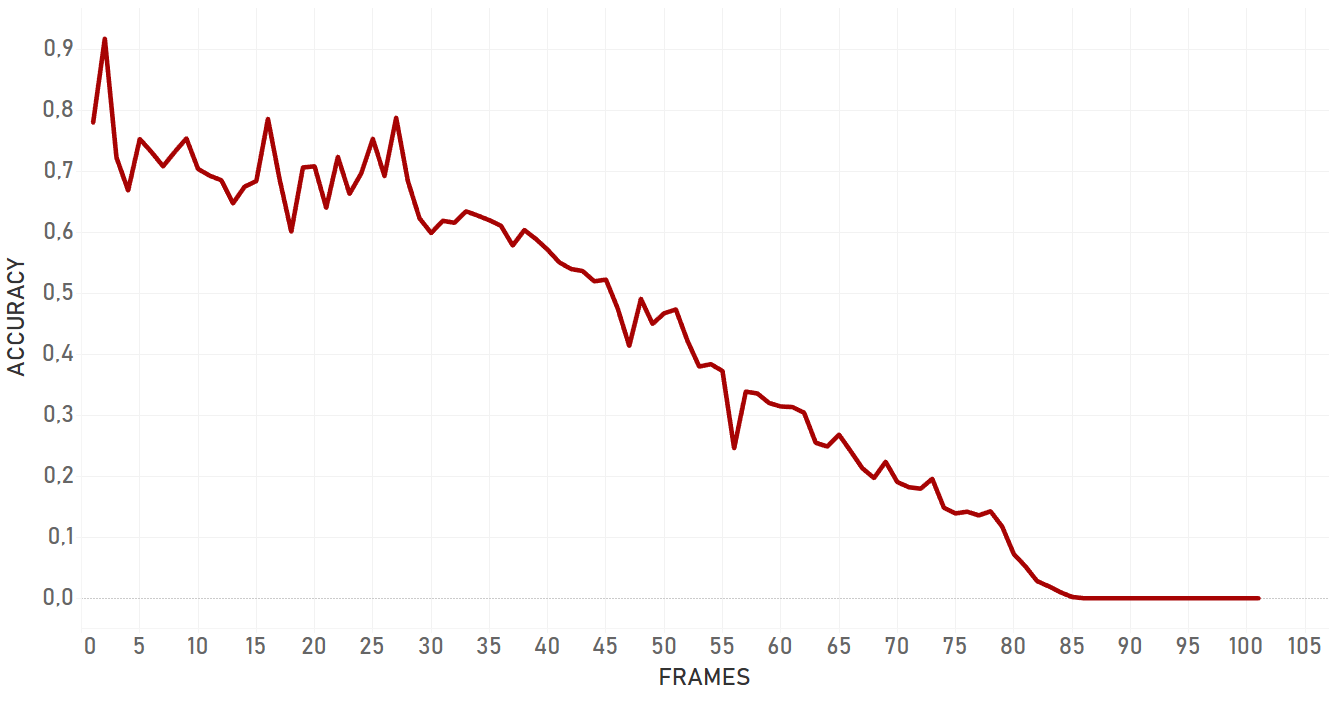
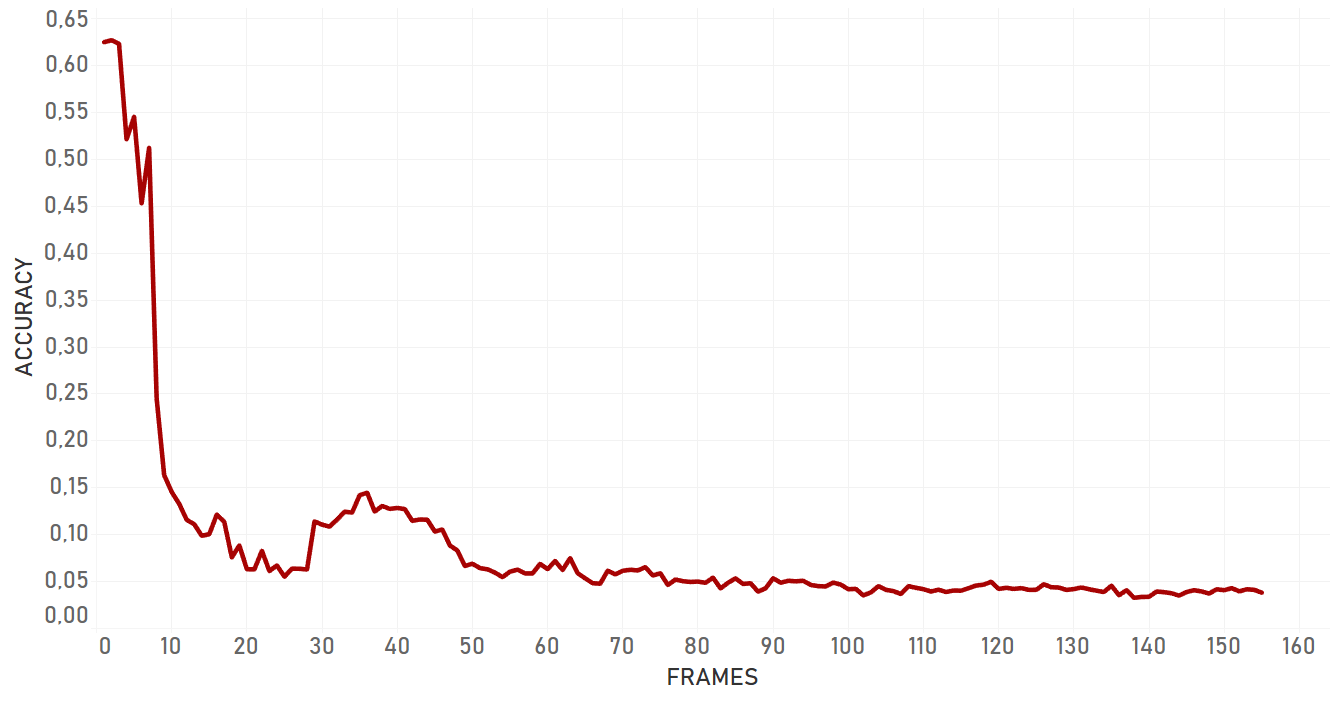
Here we used intersection over union of ‘right’ bounding box and bounding box we got as a result of tracker work.
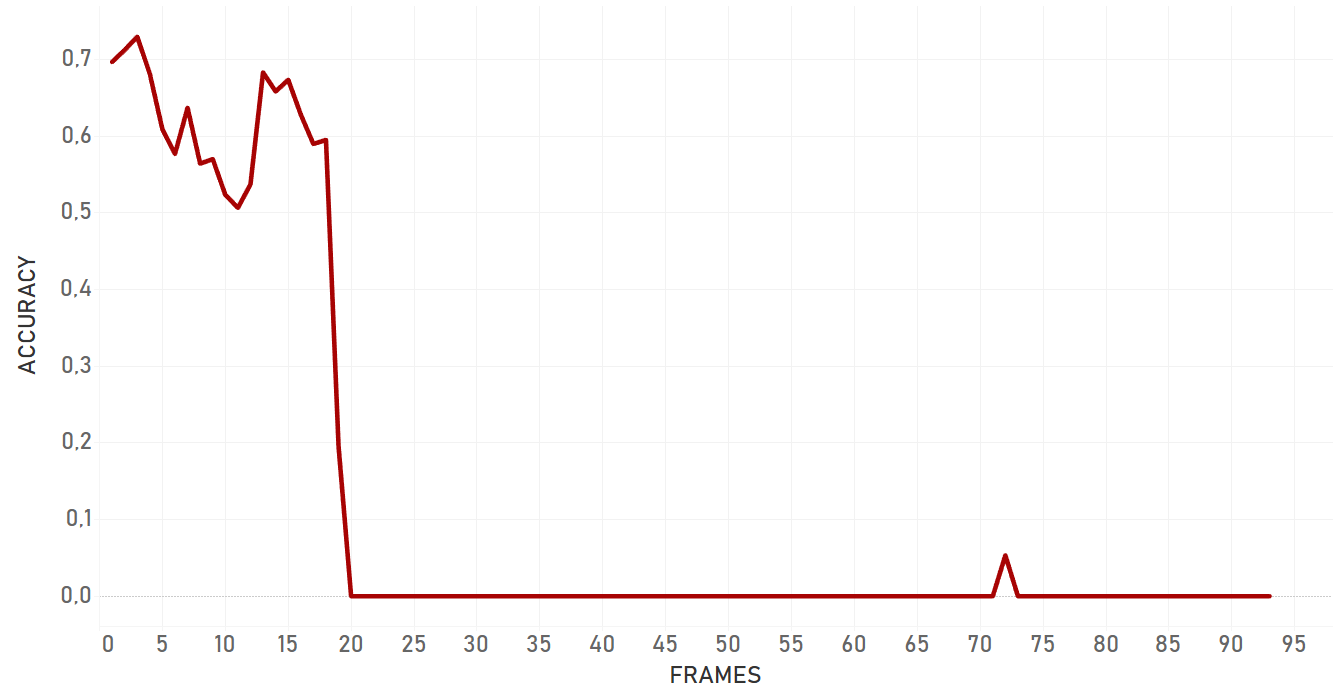
Overall, dlib doesn’t show confident and effective performance in case of moving camera. For the occlusion even with static camera, it lost the target and switched to the occlusion itself. Also, dlib is not very flexible for the appearance changing, so if the target changes its state, algorithm will most probably fail. Dlib is perfect for simple cases and quick analysis — when we need to track objects with predictable and linear trajectories, with no rapid and significant changes in object appearance and environment, no occlusions, and a static camera. Importantly, pure dlib is significantly slower than re3 (which is described further).
KCF — Kernelized Correlation Filter. In general, KCF algorithm works similarly to dlib, so we will not describe the process once again. In this paper we will highlight computational differences between two algorithms, which are almost purely mathematical and can be described by formulas.
I. Bandwidth of Gaussian is dependent on target size.
The initial preparation of the data for KCF is the same as for dlib: we extract object features (denote them F) from the area under the manually created bounding box. To do so, we use the same 31 dimensional version of HOG features. The difference is appearing when we create ‘Gaussian peak’, filling matrix G of some predefined size, making the values dependent on target size.
II. Different approach on Gaussian Correlation.
Under Gaussian Correlation we will understand correlation response map of the Gaussian kernel, expressed by the formula:

In order to find bigger response, we look for the maximal real value between values, as described by the formula:

Note the difference between this formula and (2), used in dlib for computing maximal response.
III. As we use another correlation kernel, formulas for initializing and updating filters will be different.
After we make filter B equal to F and compute Gaussian correlation for this frame, passing
![]()
we initialize filters in the following way:
IV. Scale and location finding are done in one step.
We build a pyramid and find best scale with best correlation output. Then we update the size of the rectangle, and after some geometric transformations (necessary because of repeated image transformations before) we compute current location of the top left corner of the rectangle. Then we update filters by the formulas of A and B provided above (using features of the patch) extracted using new location and new scale.
As it mentioned above, our goal was to make the tracking algorithm work on videos shot by moving camera, so it may happen that scale of the target will change not so much from frame to frame when the object is moving far from camera, but will change very fast when it will, for example, pass near the camera. At the same time, when the appearance of the object changes dramatically, it may happen that we will get a high response on far pyramid layers, getting fast scale change as a result. In order to find the right balance, we add weighting of each response with a Gaussian at the center of the current scale (that is with zero mean) and some standard deviation, which can be computed from the 3 sigma rule, for example, depending on what exactly the number of layers you want to trust to a greater extent.
| Background clutter case (Background Clutter).Test covers the situation when the person is moving forward in a crowd of other people, being slightly occluded by one of them at a certain moment.
| Appearance changing (3D Rotation). Test covers the situation when target makes 3D rotation (person turns). |
| Artist case (Artist).Test covers the situation when the person is static, but the camera moves dynamically. Moreover, target is small and dark.
| Occlusion by human (Occlusion). Test covers the situation when the person is occluded by another one (occlusion by an object of the same nature).
|
| Appearance changing (Plane Rotation).Test covers the situation when target is moving in vertical and horizontal scales (target sits and stands up from the sofa).
| Occlusion by object (Car). Test covers the situation when the target is rapidly hidden behind the part of road construction (occlusion by an object of a different nature).
|
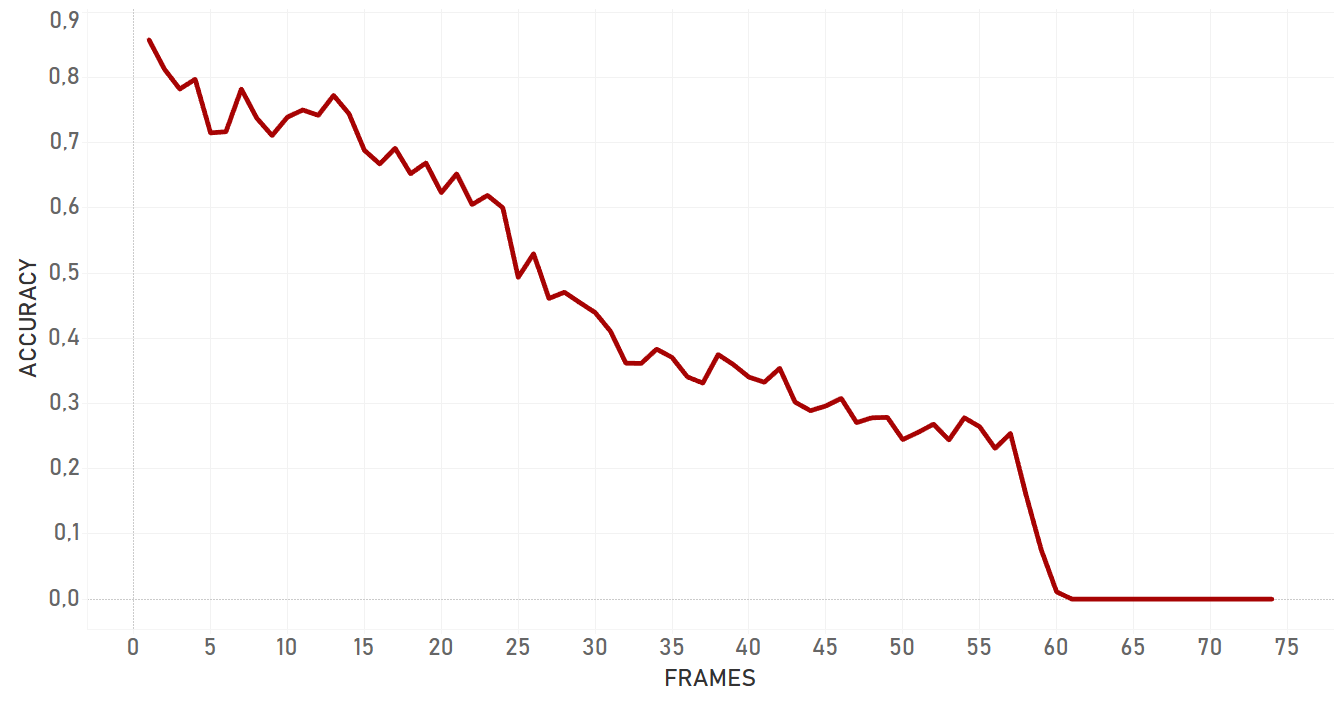
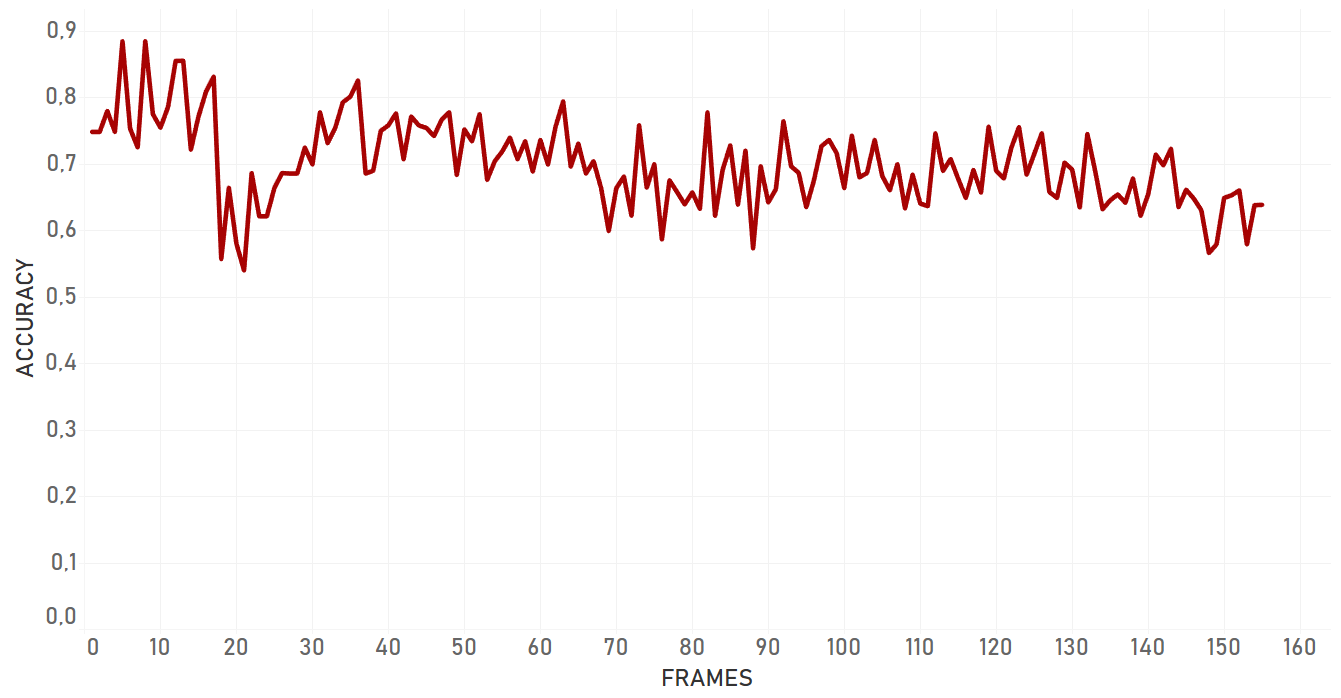
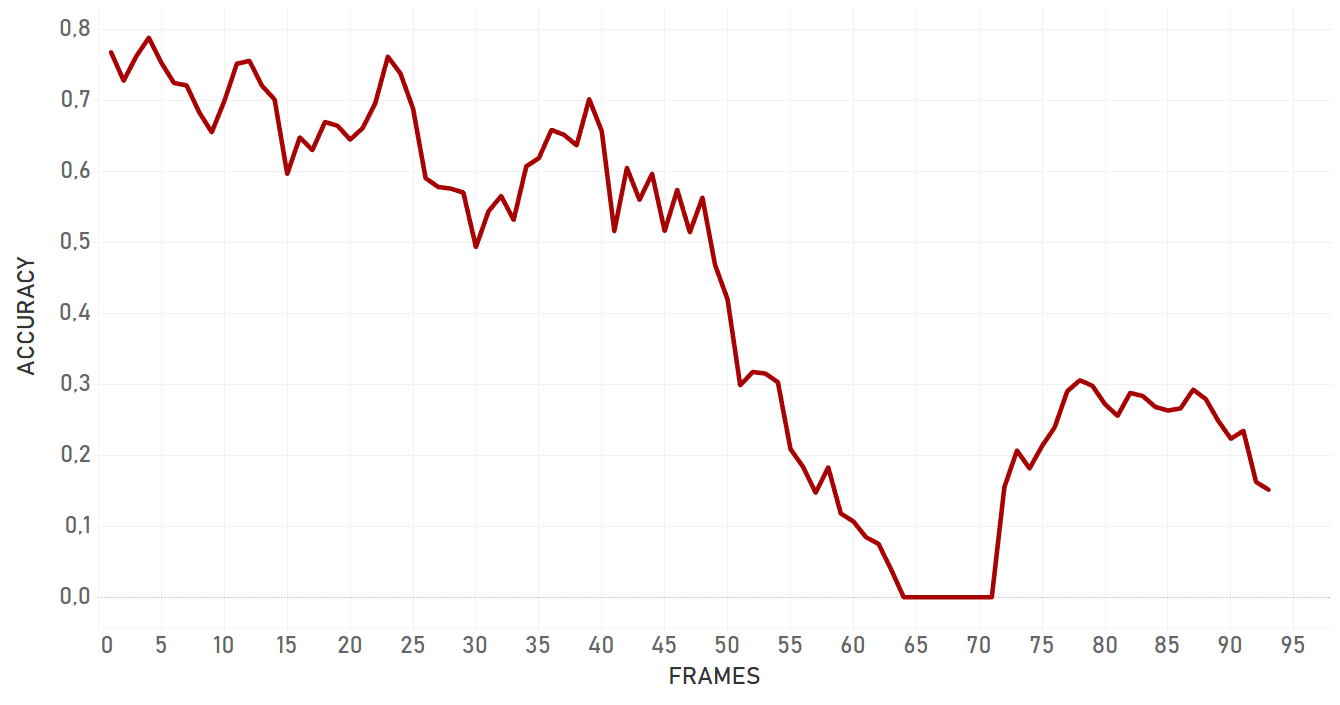
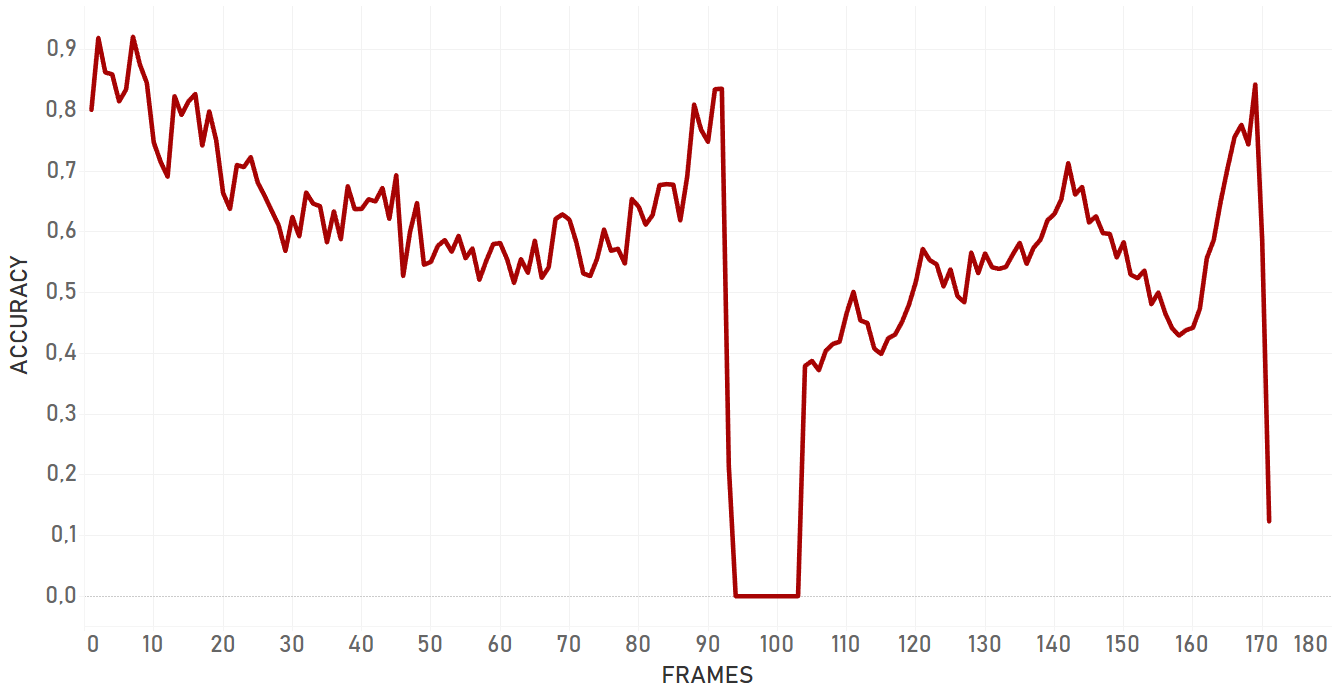
In our tests, KCF performed in a more efficient manner than dlib and showed better results in complex cases. It was more adaptive to the change of appearance, occlusions and noise of the same nature around of object, it took more time for KCF to fail. In general, KCF showed significant stability, which is the highest out of all three algorithms we explain here in some cases (for example, Artist case or Background clutter case before occlusion).
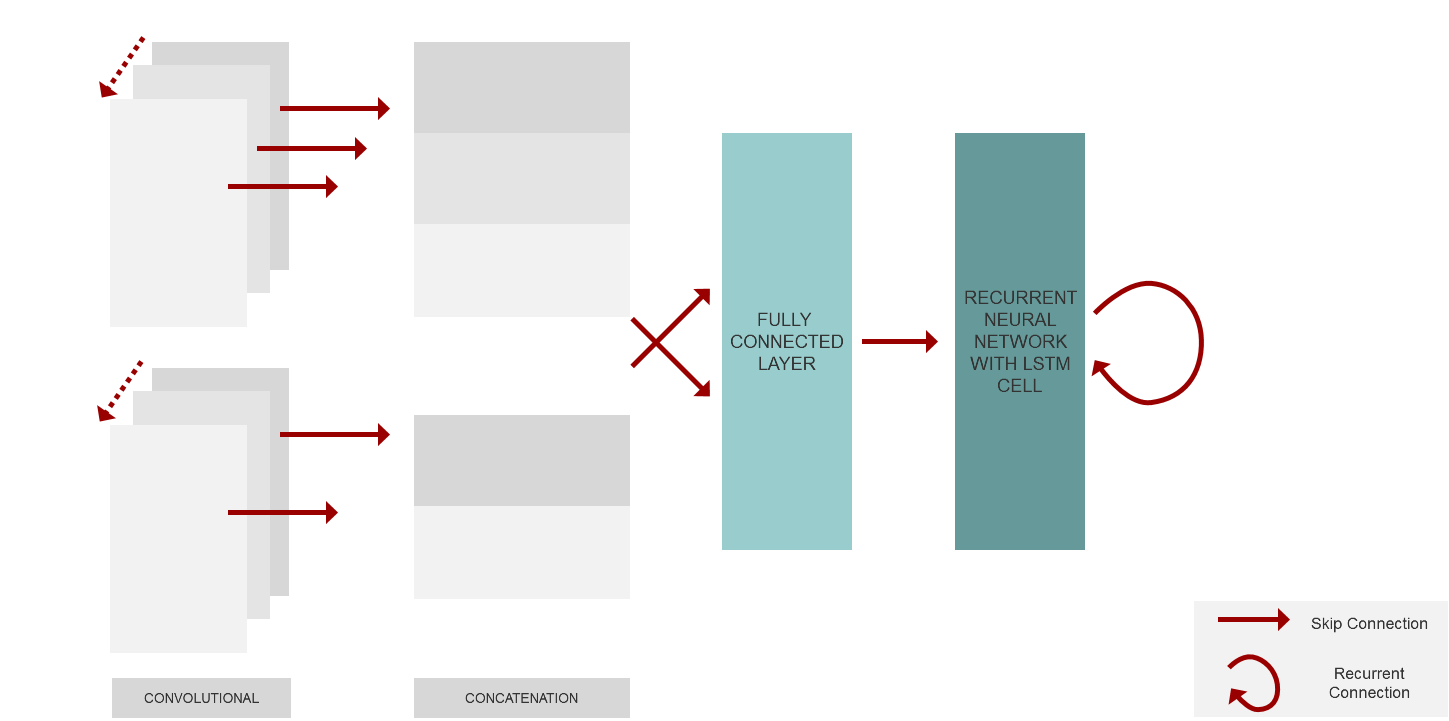
Re3 is the Real-Time Recurrent Regression Networks for Visual Tracking of Generic Objects. It is known, that recurrent networks often take more iterations to converge and require more hyperparameter selection, and that is the reason they are more difficult to train than feed-forward networks. Re3 present a method of training a recurrent tracking network which translates the image embedding into an output bounding box while simultaneously updating the internal appearance and motion model. The architecture of the network contains convolution layers, skip connections, recurrent and regression layers. Convolution layers allow us to embed the appearance of the object. The structure of the convolutional network extracts different information from different layers, such as the lowest layers that output features like edge maps, and deeper layers, which are responsible for capturing high-level concepts. Skip connections allow us to recover more fine-grain detail. Recurrent layers remember appearance and motion information, and a regression layer outputs the location of the object.
At each step, we feed the network a pair of crops from the image sequence, where the first crop represents the object at the previous frame while the second crop represents the part of the current image centered at the location of previous frame. Thereby the network can directly compare differences in the two frames and learn how motion affects the image pixels.
Regarding recurrent structure, two-layer, factored LSTM (the visual features are fed to both layers) with peephole connections was chosen. The output and cell state vectors update as the object appearance changes. As each video progresses, the LSTM state is transformed, resulting in many long, thin paths that follow the ordering of the frames in the original video. The second LSTM’s outputs are fed into a fully-connected layer with four output values representing the top left and bottom right corners of the object box in the crop coordinate frame. By regressing these coordinates, we can directly handle size and aspect ratio changes. An L1 loss is used on the outputs to encourage exact matches the ground truth and limit potential drift.
It is also interesting to pay attention to the unrolling during training, as recurrent networks generally take many more iterations to converge than comparable feed-forward networks. This is likely because the inputs are all fed in sequentially, and then one or many outputs and losses are produced. For effective tracking, it is crucial that each input is immediately followed by a corresponding output. So the authors use a training curriculum that begins with few unrolls, and slowly increases the time horizon that the network sees to teach it longer-term relationships. So they initially train the network with only two unrolls and a mini-batch size of 64. After the loss plateaus, they double the number of unrolls and halve the mini-batch size until a maximum unroll of 32 time steps and a mini-batch size of 4.
When training, authors have employed a regime of training that initially relies on ground-truth crops, but over time the network uses its own predictions to generate the next crops. This is because if a network is provided with ground-truth crops at test time, it quickly accumulates more drift than it has ever encountered, and so loses track of the object. This can happen if the recurrent network is trained by feeding ground truth outputs into the future time steps rather than the network’s own predictions. So, initially only the ground truth crops are used, and as the number of unrolls is doubled , the probability of using predicted crops is increased to 0.25, then subsequently to 0.5 and 0.75. So, the random decision is making over the whole sequence rather than at every step independently.
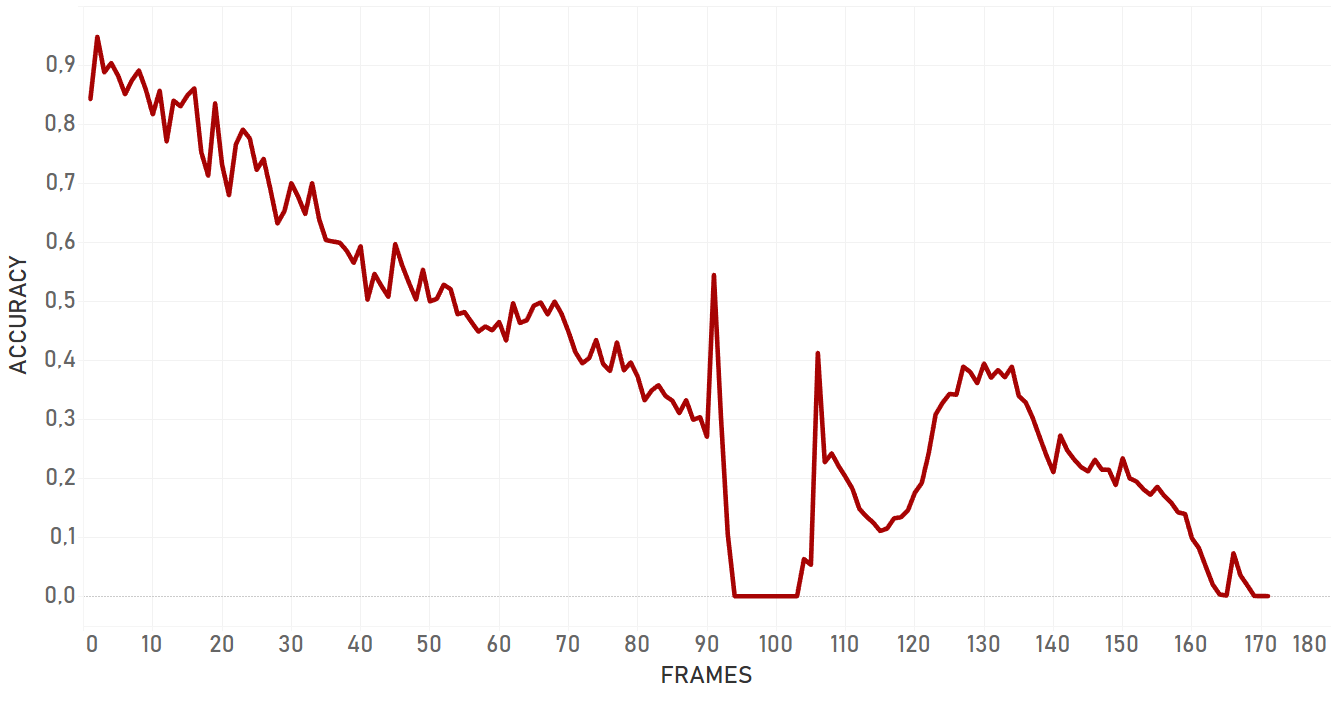
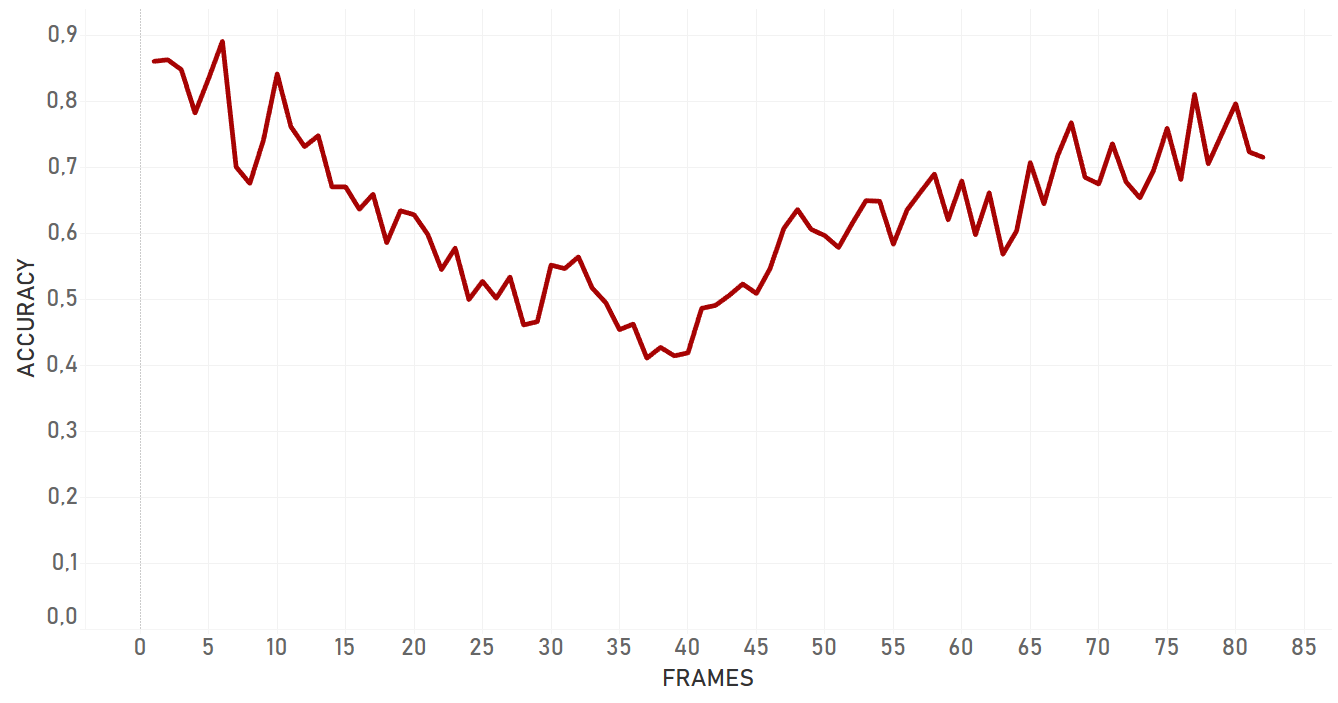
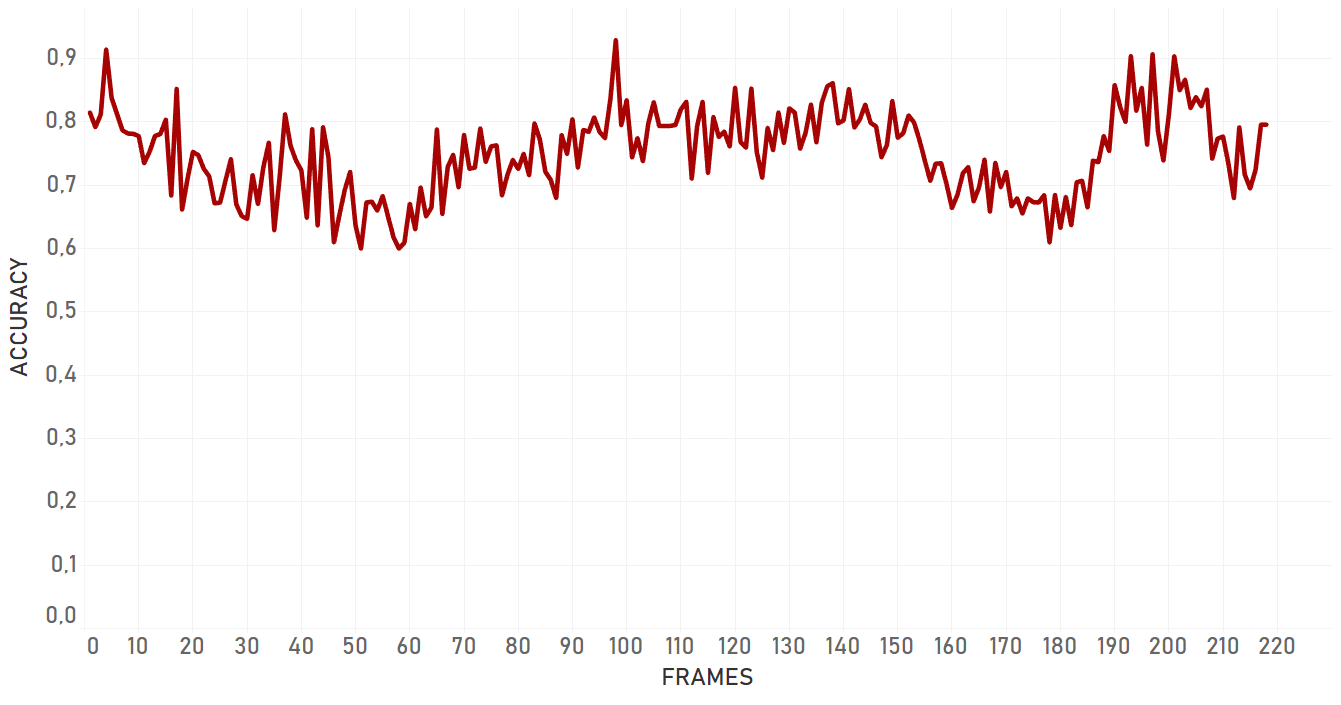
Re3 has showed amazing velocity (around 100 FPS or more) and accuracy performance, with the exception of cases with occlusions by the objects of similar nature. For example, if a person is occluded by another person, there is a high probability that tracker will change the target.
| Background clutter case (Background Clutter).Test covers the situation when the person is moving forward in a crowd of other people, being slightly occluded by one of them at a certain moment.
| Appearance changing (3D Rotation). Test covers the situation when target makes 3D rotation (person turns). |
| Artist case (Artist).Test covers the situation when the person is static, but the camera moves dynamically. Moreover, target is small and dark.
| Occlusion by human (Occlusion). Test covers the situation when the person is occluded by another one (occlusion by an object of the same nature).
|
| Appearance changing (Plane Rotation).Test covers the situation when target is moving in vertical and horizontal scales (target sits and stands up from the sofa).
| Occlusion by object (Car). Test covers the situation when the target is rapidly hidden behind the part of road construction (occlusion by an object of a different nature).
|
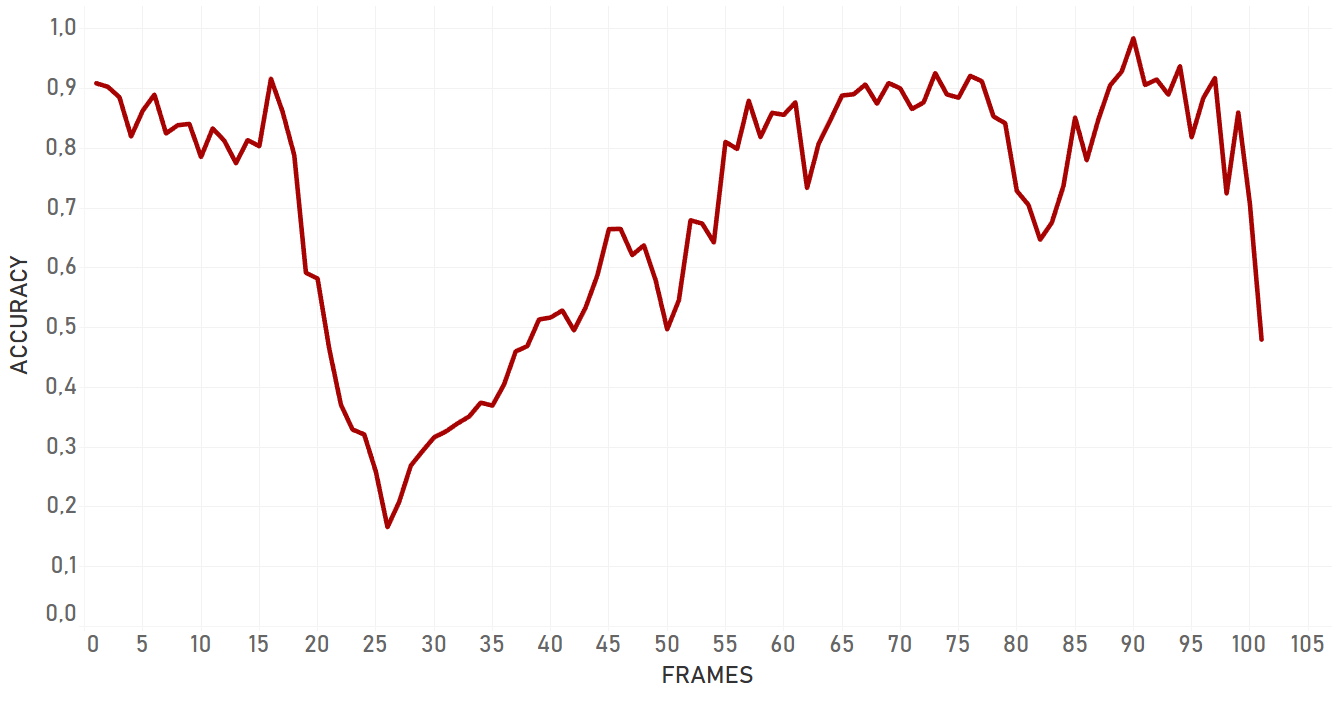
Re3 showed good results in almost all the cases, including rapid change of object appearance, change of lightning, fast moving and occlusions. Moreover, it was the only algorithm which was able to catch object once again following a full occlusion, if the object disappeared for a small amount of time and appeared again approximately on the same area of the frame. In case of a partial occlusion, re3 performed even better and dropped significantly later than dlib or KCF algorithms. Re3 is perfect for cases with objects which change their appearance, scale and speed, for full and partial occlusions. The only important weak place of the algorithm which we were able to detect is that its performance significantly drops in case of occlusion with the object of the same nature. In our tests, re3 could not handle this scenario efficiently.
The main goal of the project was to explore existing opportunities to create stable and accurate piece of software which is able to track various objects in moving camera footage. We were able to accomplish the main challenge and achieve fast and accurate performance in poor conditions of recordings.
Later on, the solution can be used for deeper analysis of videos made by people, body-wearing cameras, dashboard cams, etc. Importantly, the tracking challenge always require a tailored solution which will take into consideration all aspects of the background, including static or dynamic cameras, the quality of recording, environment conditions, and more. There is no universal and standard solution which will fit all cases and requirements, all of them should be observed with attention and in details.
At Oxagile, we are constantly conducting deep research of algorithms and technologies and increase accuracy of our tracking system to improve the overall performance and achieve better results. Later on, we are looking to develop custom and high-quality solutions for specific business cases with great attention to the idea of what and why is needed for a product to be effective and valuable to a client.
Now we are going further into additional value provided by tracking systems. Diving deeper into complex occlusions and crowd analysis, we need to develop more sophisticated systems with a mixture of object detection, classification and tracking, which will allow us to compensate for weak places of the tracking alone and open additional opportunities.
Stay tuned to receive further updates on this topic!
1. http://dlib.net/dlib/image_processing/correlation_tracker.h.html
2. Object Detection with Discriminatively Trained Part Based Models by P. Felzenszwalb, R. Girshick, D. McAllester, D. Ramanan IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 32, No. 9, Sep. 2010
3. http://www.robots.ox.ac.uk/~joao/publications/henriques_tpami2015.pdf
4. https://arxiv.org/abs/1705.06368

